微信公众号

手机端

搜索






微信扫一扫:分享

微信里点“发现”,扫一下
二维码便可将本文分享至朋友圈

编辑/VR陀螺
NVIDIA GTC 2026大会上,PICO与NVIDIA联合发布沉浸式机器人遥操作开源方案Isaac Teleop,旨在通过标准化XR遥操作与数据采集流程,加速“物理人工智能(Physical AI)”与具身智能的发展,为全球机器人开发者提供一套标准化、高保真的数据生产管线。
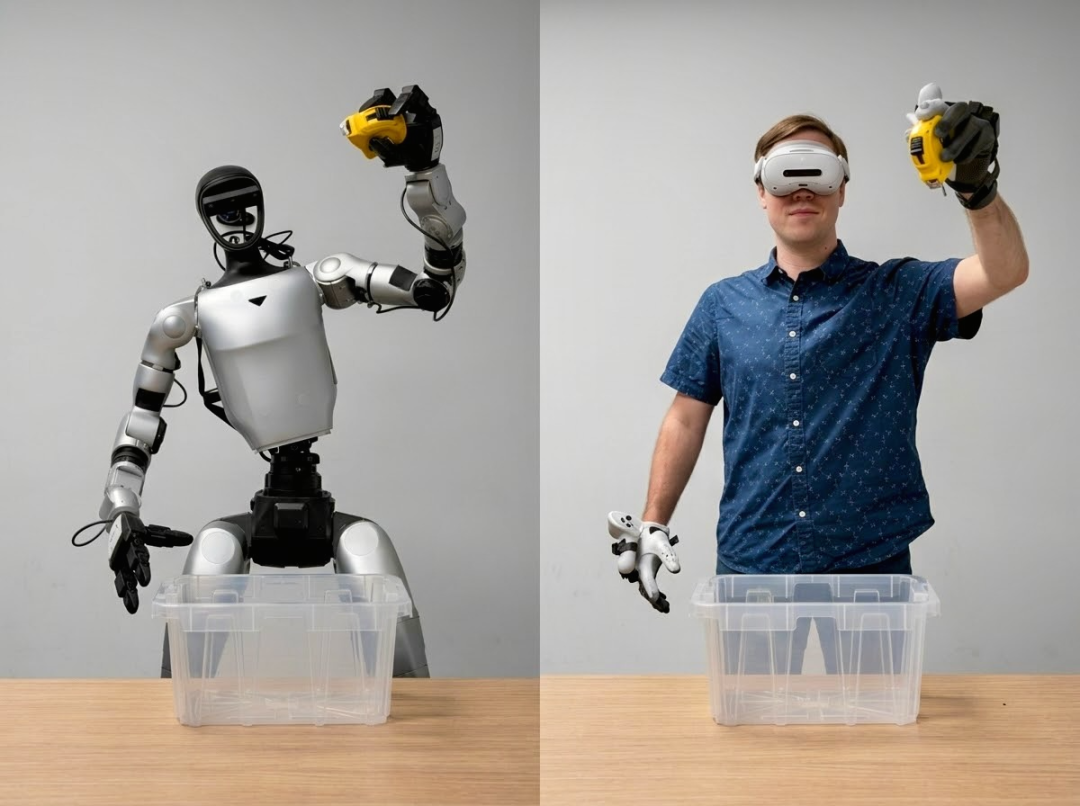
该方案将PICO XR硬件能力与NVIDIA Isaac平台深度融合,重点解决机器人训练数据获取成本高、系统开发碎片化以及仿真与真实环境割裂等长期行业难题,为全球开发者提供统一的数据生产与操控框架。
在传统机器人遥操作流程中,不同硬件设备(VR头显、手套、定制控制器等)往往需要单独适配,导致开发成本高、复用性差。同时,数据采集过程中数据流不同步与信息损耗,也会影响后续模型训练效果。而大规模真实机器人数据采集成本高昂,使得行业长期依赖仿真数据,难以实现高质量闭环。
针对上述问题,PICO x NVIDIA Isaac Teleop提供了一套统一的标准化遥操作架构。
值得关注的是,PICO在现场还预览了下一代头显,代号为Project Swan。该设备预计将具备双眼4K显示、更低延迟传输与更强空间计算能力,并将与Isaac Teleop深度集成,用于进一步提升遥操作精度与实时性。

目前,该方案已支持PICO 4 Ultra与WebXR接入,并已开源相关工具链,开发者可通过GitHub获取完整代码与文档。
PICO先前为机器人社区贡献的XRoboToolkit已经服务百家机器人组织,并获得了IEEE SII 2026最佳论文奖。全球开发者可利用PICO设备构建自己的机器人数据集。和英伟达联手开源技术和生态合作,PICO进一步将机器人遥操作从现实到仿真、从本地到云端拓展了应用范围。
来源:PICO开发者
投稿/爆料:tougao@youxituoluo.com
稿件/商务合作: 林南(微信 19250561593) 六六(微信 13138755620)
加入行业交流群:林南(微信 19250561593)

元宇宙数字产业服务平台
下载「陀螺科技」APP,获取前沿深度元宇宙讯息




























