微信公众号

手机端

搜索






微信扫一扫:分享

微信里点“发现”,扫一下
二维码便可将本文分享至朋友圈


文 | VR陀螺 云吞
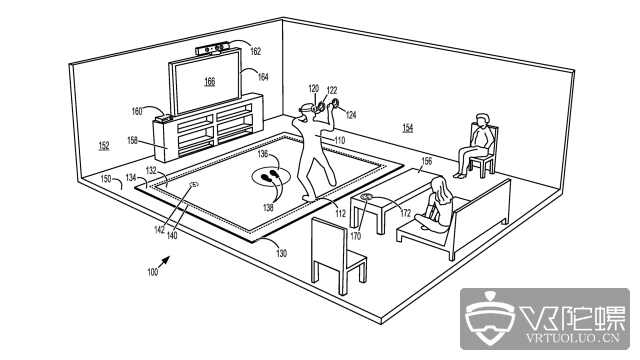
你心目中理想的VR体验是什么样的? 每当VR陀螺采访别人这个问题时,总会收获许多天马行空的答案:有人想戴上头盔一秒灵魂出窍,慢慢漂浮进无垠的宇宙中;有人想上天下地无所不能,这一刻有翅膀下一刻能入海;许多男生都希望能成为漫画中的大英雄,在酷炫的打斗中消灭敌人、保卫地球…… 但现实是,尽管画面已经能做到十分精良,目前最优秀的VR头盔产品也只能允许用户在房间大小内的范围移动,之前还要拖着一根长长的“辫子”——和电脑连接的数据线,不过现在已经推出无线套件,预计将在2017年第二季度上市。而给予了移动自由的一体机和手机盒子类产品却因为处理器性能问题,大多只能给用户提供3自由度的体验,换言之,虚拟世界不会与你的移动具有同步性,大大削弱了沉浸感。 这其中牵扯到的一项至关重要的技术便是定位追踪技术。稍微对VR有所了解的小伙伴都应该知道,目前VR头显的定位追踪解决方案大致分为“Outside-in”和“Inside-out”两大类型。那么,这两种方案的具体原理究竟是怎样的?对于VR的意义在于?哪一种技术类型更加优越? 接下来,就让VR陀螺用五分钟时间彻底开八“Outside-in vs. Inside-out”,让大家对VR的认知更上层楼。 Outside-in::精度、准度我最强 首先必须明确一个概念:无论是outside-in还是inside-out都是解决方案的统称,而非具体的某一种技术。 Outside-in,顾名思义就是依靠外部的摄像头和发射器来捕捉和追踪用户的动作。用打猎来比喻的话,外部的这些追踪仪器都是虎视眈眈的“猎人”,戴着头盔拿着手柄的用户则成了“兔子”,时刻处于猎人的监控之下。目前的高端VR头盔大多采用的是这种定位追踪技术,因为效果较好、实现起来比较简单,包括HTC Vive、Oculus Rift和PS VR在内都是如此。那么不同品牌的头盔采用的outside-in技术又有什么不同呢? HTC Vive:Vive所使用的定位技术被称为“灯塔(Lighthouse)”,属于outside-in技术的一种,由Valve公司研发,是目前公认的效果最好的定位技术之一。  HTC的Lighthouse室内定位技术属于激光扫描定位技术,通过墙上的两颗激光传感器识别佩戴者佩戴的机身上的位置追踪传感器,从而获得位置和方向信息。
HTC的Lighthouse室内定位技术属于激光扫描定位技术,通过墙上的两颗激光传感器识别佩戴者佩戴的机身上的位置追踪传感器,从而获得位置和方向信息。  激光定位的优势在于,价格相对较低,且没有延迟、不怕遮挡、准确度高。实际上Lighthouse的硬件部分技术并不复杂,Valve开发的算法才是技术核心。Valve日前表示今年内会有更多的配备该技术的VR设备上市,相信Lighthouse在一段时间内仍然会是效果最好的技术。 Oculus Rift:Rift采用的是红外光学定位技术,其定位系统被称为“星座(constellation)”。 Oculus Rift采用的是主动式红外光学定位技术,头显和手柄上有可以发出红外光的“红外灯”,然后利用两台摄像机进行拍摄。
激光定位的优势在于,价格相对较低,且没有延迟、不怕遮挡、准确度高。实际上Lighthouse的硬件部分技术并不复杂,Valve开发的算法才是技术核心。Valve日前表示今年内会有更多的配备该技术的VR设备上市,相信Lighthouse在一段时间内仍然会是效果最好的技术。 Oculus Rift:Rift采用的是红外光学定位技术,其定位系统被称为“星座(constellation)”。 Oculus Rift采用的是主动式红外光学定位技术,头显和手柄上有可以发出红外光的“红外灯”,然后利用两台摄像机进行拍摄。  在Touch手柄上市之前,Rift的房间级追踪技术一直被吐槽鸡肋,但从目前的效果来看二者的搭配使用还是很不错的。红外光学定位技术的精度也非常高,但劣势在于成本非常高,且摄像头视角有限,因此“星座”的可活动范围比“灯塔”要小。
在Touch手柄上市之前,Rift的房间级追踪技术一直被吐槽鸡肋,但从目前的效果来看二者的搭配使用还是很不错的。红外光学定位技术的精度也非常高,但劣势在于成本非常高,且摄像头视角有限,因此“星座”的可活动范围比“灯塔”要小。  PS VR:索尼PS VR采用的是可见光定位技术。这种技术直接利用可见光,在不同的被追踪物体上安装能发出不同颜色的发光灯,摄像头捕捉到这些颜色光点从而区分不同的被追踪物体以及位置信息。因此PS VR的两个手柄上的两盏灯并不是装饰,而是定位技术所需要的可见光。
PS VR:索尼PS VR采用的是可见光定位技术。这种技术直接利用可见光,在不同的被追踪物体上安装能发出不同颜色的发光灯,摄像头捕捉到这些颜色光点从而区分不同的被追踪物体以及位置信息。因此PS VR的两个手柄上的两盏灯并不是装饰,而是定位技术所需要的可见光。  可见光定位的成本最低,且无须后续的算法,灵敏性、稳定性都很好。不足在于定位精度相对较差,如果灯光被遮挡就无法确认位置。而且对环境要求也比较高,假如周围光线太强,灯光被削弱,可能无法定位,如果周围有和手柄相同色的光源可能导致定位错乱;同时也由于摄像头视角原因,可移动范围小,灯光数量有限,可追踪目标不多。
可见光定位的成本最低,且无须后续的算法,灵敏性、稳定性都很好。不足在于定位精度相对较差,如果灯光被遮挡就无法确认位置。而且对环境要求也比较高,假如周围光线太强,灯光被削弱,可能无法定位,如果周围有和手柄相同色的光源可能导致定位错乱;同时也由于摄像头视角原因,可移动范围小,灯光数量有限,可追踪目标不多。  Inside-out:想说爱你不容易 不知你有没有看过去年上映的动画电影《头脑特工队》?真是巧了,这部电影的英文名也叫《Inside-out》!在影片中,人类的五种情绪:欢乐、厌恶、害怕、忧虑和愤怒以拟人的形式生活在人类的大脑中,从人类的视角来看世界。
Inside-out:想说爱你不容易 不知你有没有看过去年上映的动画电影《头脑特工队》?真是巧了,这部电影的英文名也叫《Inside-out》!在影片中,人类的五种情绪:欢乐、厌恶、害怕、忧虑和愤怒以拟人的形式生活在人类的大脑中,从人类的视角来看世界。  Inside-out的原理也可以从差不多的角度理解:本来在外部的摄像头和传感器现在被直接安装到了头显上面,从用户自身为基点,开始扫描周围的环境,从而计算出用户在空间中的相对位置和运动轨迹。 说到inside-out技术的好处,当然就是给予了用户充分的移动性和便捷性。搭配了inside-out技术的头盔不再需要在外部放置摄像头一类的追踪器,省去了额外的安装环节, 在不同的场地使用也不用重复搭建追踪系统。
Inside-out的原理也可以从差不多的角度理解:本来在外部的摄像头和传感器现在被直接安装到了头显上面,从用户自身为基点,开始扫描周围的环境,从而计算出用户在空间中的相对位置和运动轨迹。 说到inside-out技术的好处,当然就是给予了用户充分的移动性和便捷性。搭配了inside-out技术的头盔不再需要在外部放置摄像头一类的追踪器,省去了额外的安装环节, 在不同的场地使用也不用重复搭建追踪系统。  Inside-out方案中使用到的最重要的技术之一就是SLAM(simultaneous localization and mapping,同步定位与地图构建)。这一技术可以依靠自身传感器在未知环境中获得感知信息,递增地创建周围环境的地图,同时利用创建的地图实现自主定位。实际上,SLAM在诸多领域都已经得到了实际的应用,如自动驾驶、人工智能等,最常见的例子之一就是扫地机器人。
Inside-out方案中使用到的最重要的技术之一就是SLAM(simultaneous localization and mapping,同步定位与地图构建)。这一技术可以依靠自身传感器在未知环境中获得感知信息,递增地创建周围环境的地图,同时利用创建的地图实现自主定位。实际上,SLAM在诸多领域都已经得到了实际的应用,如自动驾驶、人工智能等,最常见的例子之一就是扫地机器人。  当然,听上去很美好的inside-out面临的技术门槛却高于outside-in很多。首先这种技术对于计算机视觉算法精确度的要求更高;其次还需要在头盔上集成更多的处理器、配备性能更高的芯片等,对于头盔的设计、散热等都是不小的考验。 在inside-out方案中,由于传感器处于一个未知的空间中,因此需要根据特定的角度和外部特征点的观测结果来实时建模。这种情况下,角度差一度,物体的位置就会相差几厘米。微软在HoloLens上的SLAM技术采取了近处物体不显示的方法,以此减小误差。 目前已知有这些公司都在研发自己的inside-out技术: 微软:目前业界最成熟的inside-out方案当属微软在HoloLens上使用的追踪技术,无论是在减低眩晕、散热还是精确度方面都十分优秀。微软已经宣布,在自己即将上市的VR头显、和同阵营联想、戴尔、Acer和惠普的头显上都将应用这项技术。尽管这些头显都是PC端头显,需要连接电脑使用,但如此大规模应用Inside-out技术还属首次。
当然,听上去很美好的inside-out面临的技术门槛却高于outside-in很多。首先这种技术对于计算机视觉算法精确度的要求更高;其次还需要在头盔上集成更多的处理器、配备性能更高的芯片等,对于头盔的设计、散热等都是不小的考验。 在inside-out方案中,由于传感器处于一个未知的空间中,因此需要根据特定的角度和外部特征点的观测结果来实时建模。这种情况下,角度差一度,物体的位置就会相差几厘米。微软在HoloLens上的SLAM技术采取了近处物体不显示的方法,以此减小误差。 目前已知有这些公司都在研发自己的inside-out技术: 微软:目前业界最成熟的inside-out方案当属微软在HoloLens上使用的追踪技术,无论是在减低眩晕、散热还是精确度方面都十分优秀。微软已经宣布,在自己即将上市的VR头显、和同阵营联想、戴尔、Acer和惠普的头显上都将应用这项技术。尽管这些头显都是PC端头显,需要连接电脑使用,但如此大规模应用Inside-out技术还属首次。  Oculus:除微软之外,Oculus也一直在研发自己的inside-out技术,将会应用于旗下还未推出的一体机产品“Santa Cruz”,在头盔前部增添多颗摄像头。Oculus一直看好移动端VR的发展,inside-out技术自然会为未来的移动端产品锦上添花。
Oculus:除微软之外,Oculus也一直在研发自己的inside-out技术,将会应用于旗下还未推出的一体机产品“Santa Cruz”,在头盔前部增添多颗摄像头。Oculus一直看好移动端VR的发展,inside-out技术自然会为未来的移动端产品锦上添花。  谷歌:谷歌的Tango项目也是SLAM技术的应用典范,且具有与Daydream结合的潜力,能够有力推动inside-out方案在Daydream设备上的普及。但谷歌方面表示,现阶段散热问题十分难解决,还需要更长的时间来研发。 除了以上的三巨头之外,在今年的CES上我们还看到了这些配备inside-out技术的产品:
谷歌:谷歌的Tango项目也是SLAM技术的应用典范,且具有与Daydream结合的潜力,能够有力推动inside-out方案在Daydream设备上的普及。但谷歌方面表示,现阶段散热问题十分难解决,还需要更长的时间来研发。 除了以上的三巨头之外,在今年的CES上我们还看到了这些配备inside-out技术的产品:  高通:高通在其一体机原型上配备了基于高性能骁龙835处理器的inside-out技术,同时参展的Pico、酷开等也在自己的产品上使用的是高通的这一方案。外媒评测认为这款一体机的“漂移”问题比较大,还不是很成熟。
高通:高通在其一体机原型上配备了基于高性能骁龙835处理器的inside-out技术,同时参展的Pico、酷开等也在自己的产品上使用的是高通的这一方案。外媒评测认为这款一体机的“漂移”问题比较大,还不是很成熟。  英特尔:英特尔推出了无线MR头显Project Alloy,内置RealSense实感摄像头和inside-out追踪方案,只用预先扫描全屋即可。
英特尔:英特尔推出了无线MR头显Project Alloy,内置RealSense实感摄像头和inside-out追踪方案,只用预先扫描全屋即可。  Eonite:美国计算机视觉公司Eonite在CES上展示了自己的inside-out追踪技术解决方案,据称可以在任何VR头盔上使用,且售价十分便宜。公司的这套解决方案可以让头显有6自由度的移动范围、亚毫米级的精确度和15毫秒以下的延时。这个系统还支持实时障碍物探测甚至多空间地图测绘。
Eonite:美国计算机视觉公司Eonite在CES上展示了自己的inside-out追踪技术解决方案,据称可以在任何VR头盔上使用,且售价十分便宜。公司的这套解决方案可以让头显有6自由度的移动范围、亚毫米级的精确度和15毫秒以下的延时。这个系统还支持实时障碍物探测甚至多空间地图测绘。  蚁视:据悉蚁视是业内最早研发应用inside-out追踪方案的公司之一,早在2015年就推出过“全息甲板(HoloDeck)”追踪方案——在VR头显内置一颗摄像头,与外部标记点中的任何两点形成三角图形,再计算出目标物的空间位置。该方案的优点是运算量较小、成本低。缺点是需要在外部空间中设置大量标记点,占用空间面积。
蚁视:据悉蚁视是业内最早研发应用inside-out追踪方案的公司之一,早在2015年就推出过“全息甲板(HoloDeck)”追踪方案——在VR头显内置一颗摄像头,与外部标记点中的任何两点形成三角图形,再计算出目标物的空间位置。该方案的优点是运算量较小、成本低。缺点是需要在外部空间中设置大量标记点,占用空间面积。  结语 目前来看无论是outisde-in还是inside-out技术都有着自己的局限和优势。从今年CES上大规模涌现inside-out解决方案和一体机产品来看,2017年将会是空间定位技术和解决方案有所突破的一年,请大家尽情期待吧! 关注微信公众号:VR陀螺(vrtuoluo),定时推送,VR/AR行业干货分享、爆料揭秘、互动精彩多。
结语 目前来看无论是outisde-in还是inside-out技术都有着自己的局限和优势。从今年CES上大规模涌现inside-out解决方案和一体机产品来看,2017年将会是空间定位技术和解决方案有所突破的一年,请大家尽情期待吧! 关注微信公众号:VR陀螺(vrtuoluo),定时推送,VR/AR行业干货分享、爆料揭秘、互动精彩多。
投稿/爆料:tougao@youxituoluo.com
稿件/商务合作: 林南(微信 19250561593) 六六(微信 13138755620)
加入行业交流群:林南(微信 19250561593)

元宇宙数字产业服务平台
下载「陀螺科技」APP,获取前沿深度元宇宙讯息