微信公众号

手机端

搜索




编译/VR陀螺
今天,美国专利商标局公布了苹果公司的一项专利申请,涉及生成物理环境的三维几何表示,特别是涉及根据物理环境中检测到的深度信息生成几何表示的系统、方法和设备。
苹果公司的专利从不使用苹果的商标来描述事项。其总是先进行原始专利申请,然后才是商标。虽然今天的专利从未提及 " Object Capture(对象捕捉)",但在今年WWDC21的主题演讲中,苹果曾介绍过Object Capture,其描述的部分内容可以在今天公布的专利申请中找到。
 图源:苹果
图源:苹果
苹果公司早在6月的WWDC21上就介绍了Object Capture,其使用摄影测量法,在短短几分钟内可以将一系列2D图像变成逼真的3D对象。
今天曝光的这份苹果专利申请名为 " Single-Pass Object Scanning(单程对象扫描)",涵盖了使用选定的图像数据和深度数据子集生成三维模型的设备、系统和方法。三维模型是根据物理环境的图像、物理环境中检测到的深度信息以及其他用于追踪设备/深度相机的特定位置和方向的信息生成的。
出于各种原因,可能需要排除包括基于运动的缺陷的图像和/或只包括选定的特定图像集(例如,关键帧)。这样做可以提供一个更有用、更真实或在物理上更有意义的对象模型。
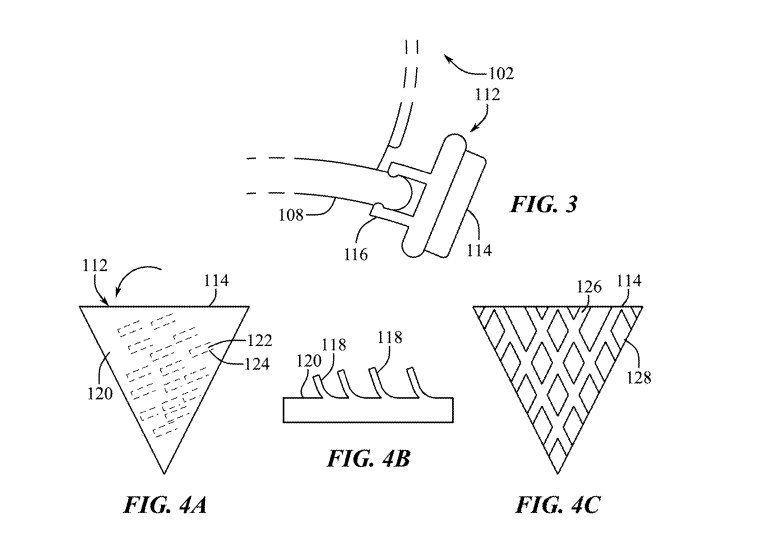
本专利公开的一些实施方案涉及一种示范性的方法,即根据选定的图像子集和与选定子集的每个图像相对应的深度数据生成一个对象的三维模型。该示例性方法涉及设备在包括对象的物理环境中移动期间获取传感器数据,该传感器数据包括通过设备上的相机捕获的物理环境的图像。
例如,用户在物理环境中围绕一个对象(例如,鞋子或椅子)移动设备(例如,iPhone),以便从不同侧面捕捉对象的图像。在一些实施方案中,传感器数据可以包括深度数据和运动传感器数据。
在一些实施方案中,设备包括一个用户界面,在设备的移动过程中,用户界面显示捕获的物理环境,包括物体(例如,实时视频流),以及基于传感器数据的物体初步3D模型。在一些实施方案中,初步的3D模型是在设备的移动过程中基于选定的图像子集生成的,并且初步的3D模型可以与通过设备相机捕获的物理环境的图像同时显示(例如,叠加在实时视频流上的画中画)。
在一些实施方案中,物体三维模型是基于生成物体的网格、三维点云或体素表示生成的。
在一些实施方案中,传感器数据包括物理环境的深度数据(例如,RGB-D)和光强图像数据(例如,RGB)。
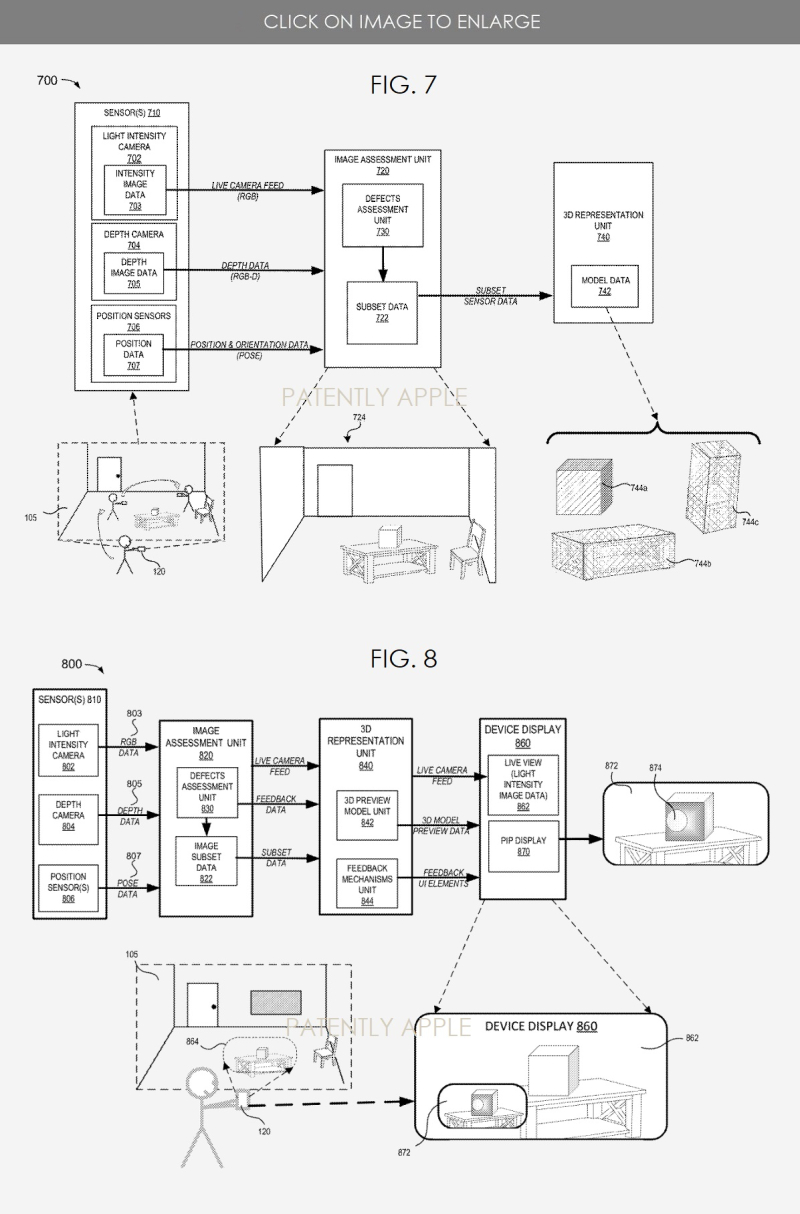 图源:patentlyapple
图源:patentlyapple
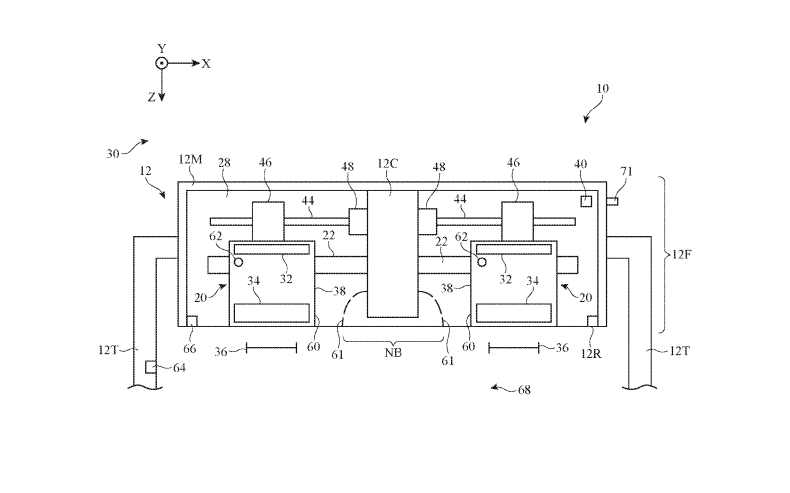
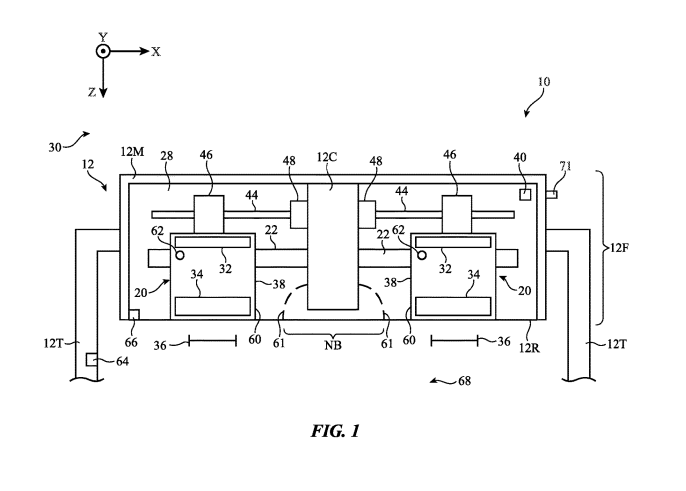
苹果的专利图7是基于图像子集和对应于子集信息的图像深度数据的3D模型示例生成的系统流程图;图8是基于图像子集和与子集信息中的每个图像相对应的深度数据,生成3D模型实时预览的示例系统流程图。
想了解更多详细内容和细节,可查看苹果公司这项专利申请号为20210264664的专利。
投稿/爆料:tougao@youxituoluo.com
稿件/商务合作: 林南(微信 19250561593) 六六(微信 13138755620)
加入行业交流群:林南(微信 19250561593)

元宇宙数字产业服务平台
下载「陀螺科技」APP,获取前沿深度元宇宙讯息